5.3 Ajuste não linear e linearização#
Muitas vezes, temos dados experimentais em que o ajuste como combinação linear nos parâmetros não é adequado e não pode ser considerado. Neste caso, necessitamos de outras famílias de funções para representar adequadamente uma função representada em uma tabela.
Ajuste hiperbólico#
Considere os dados obtidos experimentalmente, conforme ilustrado na figura abaixo

Observando a o diagrama de dispersão, vemos que a representação dos dados possui um comportamento do tipo:
Para encontrar os parâmetros \(a_1\) e \(a_2\) da forma como fizemos anteriormente, podemos linearizar a função fazendo
que aproxima a função
e temos agora o caso do ajuste linear, já desenvolvido anteriormente.
Assim, a partir da tabela original, construímos uma nova tabela
\begin{array}{cccc} \hline x_1 &x_2 &… &x_m \ \hline 1/f(x_1) &1/f(x_2) &… &1/f(x_m) \ \hline \end{array}
O problema agora consiste em aproximarmos a função \(\frac{1}{f(x)}\) por uma reta \(h(x)=a_1x+a_2\), e o sistema de equações normais é dado por
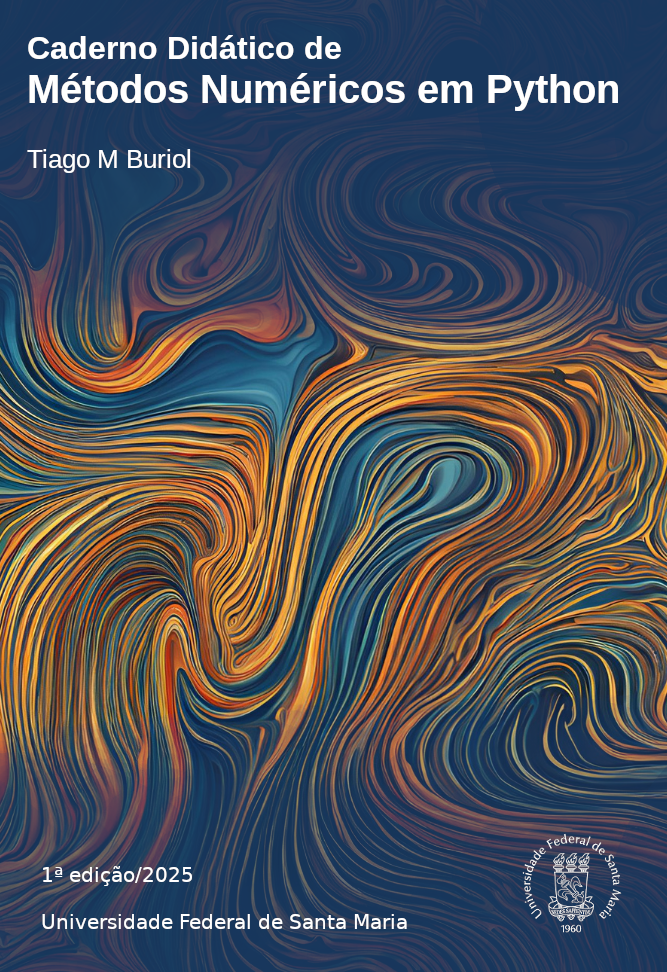
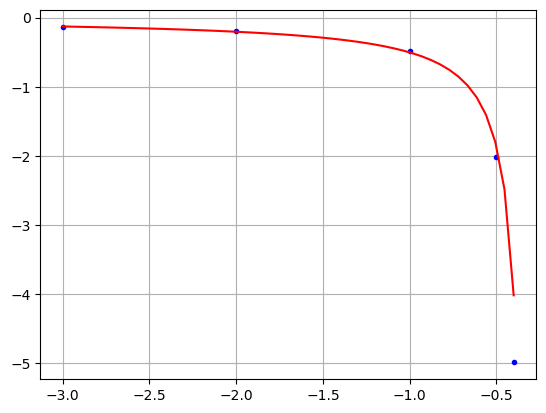
Exemplo 1: Considere a função f (x) tabelada nos pontos, como segue
\begin{array}{cccc} \hline x_1 &-3.0 &-2.0 &-1.0 &-0.5 &-0.4 \ \hline f(x_1) &-0.13 &-0.20 &-0.49 &-2.01 &-4.99\ \hline \end{array}
Solução: Plotando os pontos tem-se
import numpy as np
import matplotlib.pyplot as plt
X = np.array([ -3.0, -2.0, -1.0, -0.5, -0.4])
Y = np.array([ -0.13, -0.20, -0.49, -2.01, -4.99])
# plotando
plt.plot(X, Y, "o")
plt.grid()
plt.show()
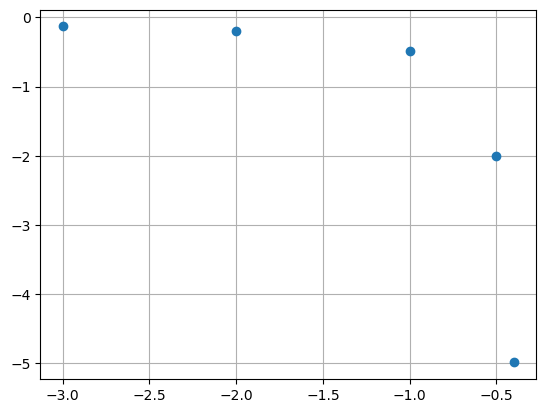
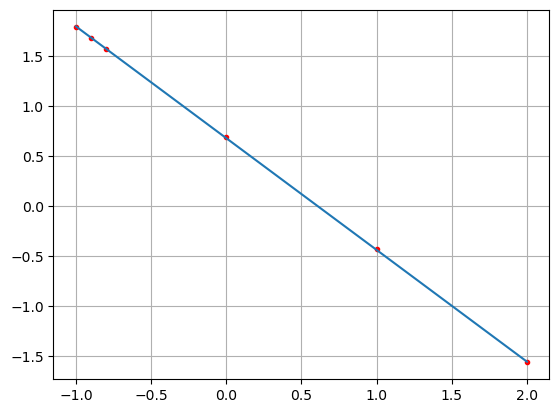
O que sugere um comportamento de uma função do tipo $\(g(x) = \frac{1}{a_1x+a_2}\)\(. Para confirmar, e verificar se a linearização do tipo \)\(h(x) = \frac{1}{g(x)} = a_1x+a_2\)$ irá funcionar, construímos uma nova tabela e plotamos os pontos
Yl = np.power(Y, -1)
print(Yl)
# plotando
plt.plot(X, Yl, "o")
plt.grid()
plt.show()
[-7.69230769 -5. -2.04081633 -0.49751244 -0.2004008 ]
Notamos que os pontos parecem alinhados agora, o que sugere que podemos obter \(a_1\) e \(a_2\) ajustando uma reta a essa nova tabela
# montando a matriz do sistema
A = np.array([[np.sum(X * X), np.sum(X)],
[np.sum(X), len(X)]])
B = np.array([np.sum(X*Yl),
np.sum(Yl)])
# resolvendo
a = np.linalg.solve(A, B)
print ("Parâmetros a1=", a[0]," e a2 =", a[1])
# lista de pontos para os plots
Xr = np.linspace(X[0], X[-1], 50)
#reta
h = lambda X: a[0]*X + a[1]
# plotando
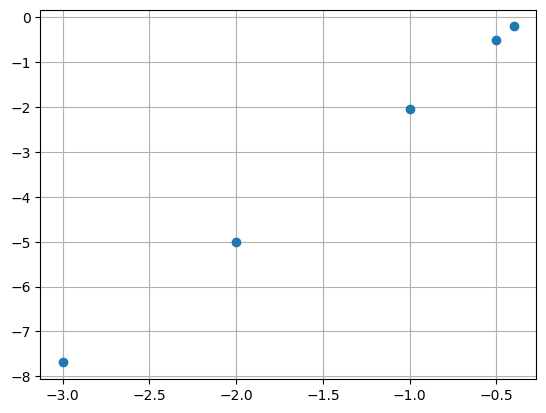
plt.plot(X, Yl, "b.", Xr, h(Xr), "r-")
plt.grid()
plt.show()
Parâmetros a1= 2.89521778367677 e a2 = 0.9091930898234516
# hipérbole
g = lambda X: np.power(a[0]*X+a[1], -1)
Yr = g(Xr)
# plotando
plt.plot(X, Y, "b.", Xr, g(Xr), "r-")
plt.grid()
plt.show()
Ajuste exponencial#
Podemos obter dados experimentais dispostos conforme ilustrado na figura abaixo, a qual sugere que devemos aproximar a função observada por uma função \(g(x)\) da forma \(g(x) = a(b)^x\) com os parâmetros \(a\) e \(b\) positivos.

O método dos mínimos quadrados desenvolvido anteriormente pode ser usado fazendo-se a seguinte transformação
Então, fazendo
temos a linearização
Então, construímos ma nova tabela
\begin{array}{cccc} \hline x_1 &x_2 &… &x_m \ \hline ln(f(x_1)) &ln(f(x_2)) &… &ln(f(x_m)) \ \hline \end{array}
e buscamos os parâmetros \(a_1\) e \(a_2\) que ajustam uma reta a esses dados, ou seja, buscamos a solução do sistema
Exercício resolvido#
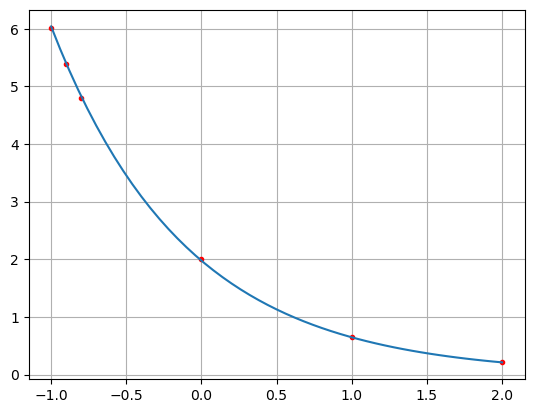
Exemplo 3: Considere uma função tabelada nos pontos, como segue:
Determine uma função \(g(x)\) que melhor se ajuste aos dados da tabela de \(f(x)\).
import math
import numpy as np
from scipy.linalg import solve
import matplotlib.pyplot as plt
X = np.array([ -1, -0.9, -0.8, 0, 1, 2])
Y = np.array([ 6.01, 5.39, 4.8, 2.01, 0.65, 0.21])
Yl = np.log(Y)
# montando a matriz do sistema
A = np.array([[np.sum(X*X), np.sum(X)],
[np.sum(X), len(X)]])
B = np.array([np.sum(X*Yl), np.sum(Yl)])
a = solve(A, B)
print (a)
# lista de pontos para os plots
Xr = np.linspace(X[0], X[-1], 51)
#reta
h = lambda X: a[0]*X + a[1]
# plotando
plt.plot(X, Yl, "r.", Xr, h(Xr), "-")
plt.grid()
plt.show()
# hipérbole
k = math.exp(a[1])
b = math.exp(a[0])
g = lambda X: k*np.power(b,X)
Yr = g(Xr)
# plotando
plt.plot(X, Y, "r.", Xr, g(Xr), "-")
plt.grid()
plt.show()
[-1.11689997 0.68139335]
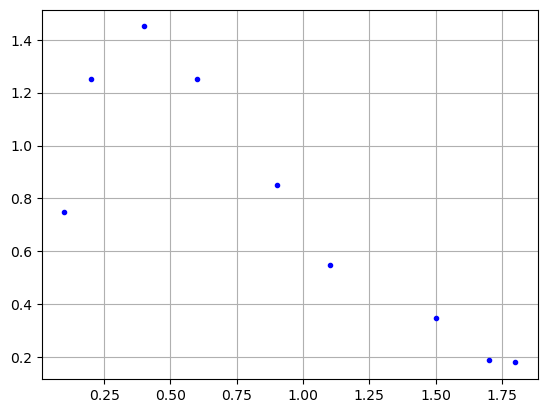
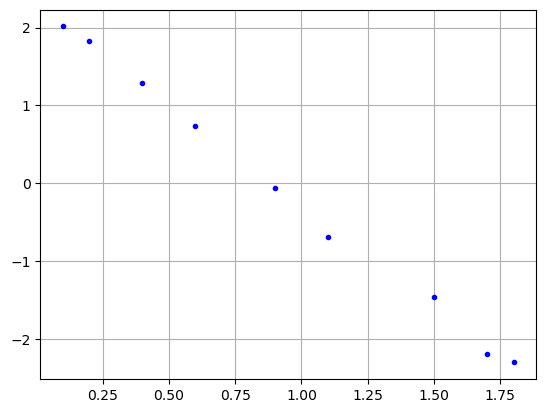
2: Linearize o modelo matemático $\( y = \alpha x e^{\beta x}\)\( e encontre os parâmetros \)\alpha\( e \)\beta\( que fornecem o melhor ajute com base nos seguintes dados. \)\( \begin{array}{cccccccccc} \hline x &0,1 &0,2 &0,4 &0,6 &0,9 &1,1 &1,5 &1,7 &1,8\\ \hline y &0,75 &1,25 &1,45 &1,25 &0,85 &0,55 &0,35 &0,19 &0,18\\ \hline \end{array} \)$
x = np.array([0.1, 0.2, 0.4, 0.6, 0.9, 1.1, 1.5, 1.7, 1.8])
y = np.array([0.75, 1.25, 1.45, 1.25, 0.85, 0.55, 0.35, 0.19, 0.18])
# plotando
plt.plot(x,y, "b.")
plt.grid()
plt.show()
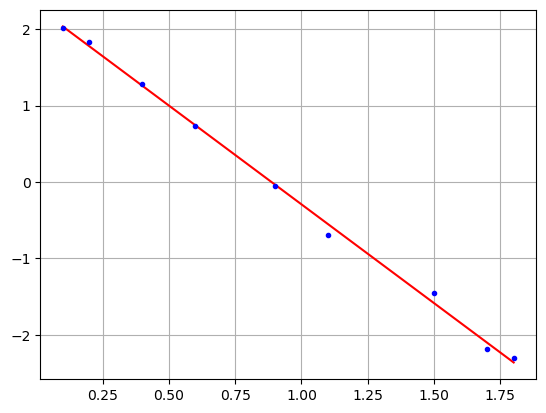
fazendo $\(ln(y)=ln(\alpha x e^{\beta x})\)\( \)\(ln(y)=ln(\alpha)+ln(x)+ \beta x\)\( \)\(ln(y)-ln(x) = \beta x + ln(\alpha)\)$
escrevendo $\(y' = a_1x+a_2\)$
sendo $\(y'=ln(y)-ln(x)\)$
obtemos os pontos alinhados
yl = np.log(y)-np.log(x)
plt.plot(x,yl, "b.")
plt.grid()
plt.show()
A = np.array([[np.sum(x * x), np.sum(x)],
[np.sum(x), len(x)]])
B = np.array([np.sum(x*yl),
np.sum(yl)])
a = solve(A, B)
alpha = np.exp(a[1])
beta = a[0]
print(alpha, beta)
9.910716948702442 -2.58708188621561
h = lambda x: a[0]*x + a[1]
xr = np.linspace(x[0], x[-1], 20)
plt.plot(xr,h(xr), "r-", x,yl, "b.")
plt.grid()
plt.show()
alpha = np.exp(a[1])
beta = a[0]
print(alpha, beta)
9.910716948702442 -2.58708188621561
g = lambda x: alpha*x*np.exp(beta*x)
xr = np.linspace(0,2, 51) plt.plot(xr,g(xr), “r-”, x,y, “b.”) plt.grid() plt.show()
Resposta: \(\alpha = 9.6618\) e \(\beta = -2.4733\)
Exemplos de linearização de algumas funções:

Exercícios:
1. Considereosdadosdeumexperimentoconformetabela: $\( \begin{array}{c|c|c|c|c|c|c|c} x_i & -9 & -6 & -4 & -2 & 0 & 2 & 4 \\ \hline f\left(x_i\right) & 30.1 & 10.1 & 8.9 & 5.9 & 5.0 & 3.9 & 4.01 \end{array} \)$
Usando o método dos mínimos quadrados e o Software Numérico, ajustar aos dados da tabela funções:
a) Hiperbólica.
b) Exponencial.
c) Compareosresultadosobtidos.
2. Ajuste os dados abaixo (número de bactérias por unidade de volume) à curva \(y=ab^x\). Plote o gráfico da função obtida juntamente com os dados tabelados. $\( \begin{array}{cccccccc} \hline nº de horas &0 &1 &2 &3 &4 &5 &6 \\ \hline nº de bactéricas &32 &47 &65 &92 &132 &190 &275 \\ \hline \end{array} \)$
3. (Fonte) Os dados tabulados a seguir foram gerados a partir de uma experiência que continha inicialmente cianeto de amônio puro (\(NH_4OCN\)). Sabe-se que tais mudanças de concen- tração podem ser modeladas pela seguinte equação:
em que \(c_0\) e \(k\) são parâmetros. Use uma transformação para linearizar essa equação. A seguir, use regressão linear para prever a concentração em \(t = 160\) min.
4. (Fonte) O modelo a seguir é usado frequentemente em engenharia ambiental para parametrizar o efeito da temperatura \(T\) (\(°C\)) nas taxas de reações químicas \(k\) (por dia),
em que \(k_{20}\) e \(\theta\) são parâmetros. Use uma transformação para linearizar essa equação. A seguir, use regressão linear para estimar \(k_{20}\) e \(\theta\) e para prever a taxa de reação em \(T = 17 °C\).
5. (Fonte) A equação de Andrade foi proposta como um modelo para o efeito da temperatura sobre a viscosidade,
onde \(\mu\) é a viscosidade dinâmica da água (\(10^{−3} N · s/m^2\)), \(T_a\) é a temperatura absoluta (\(K\)), e \(D\) e \(B\) são parâmetros. Ajuste esse modelo aos dados para a água